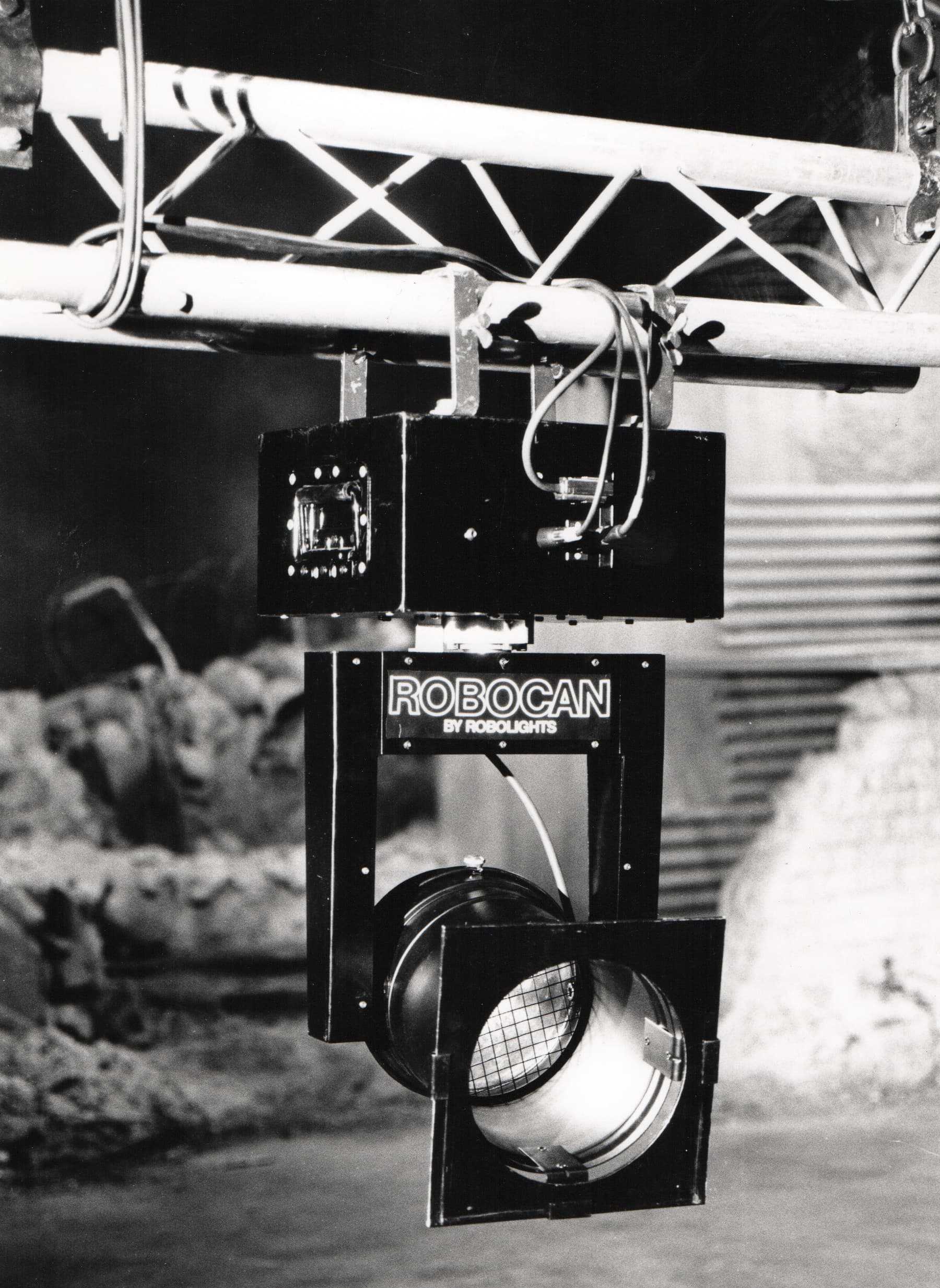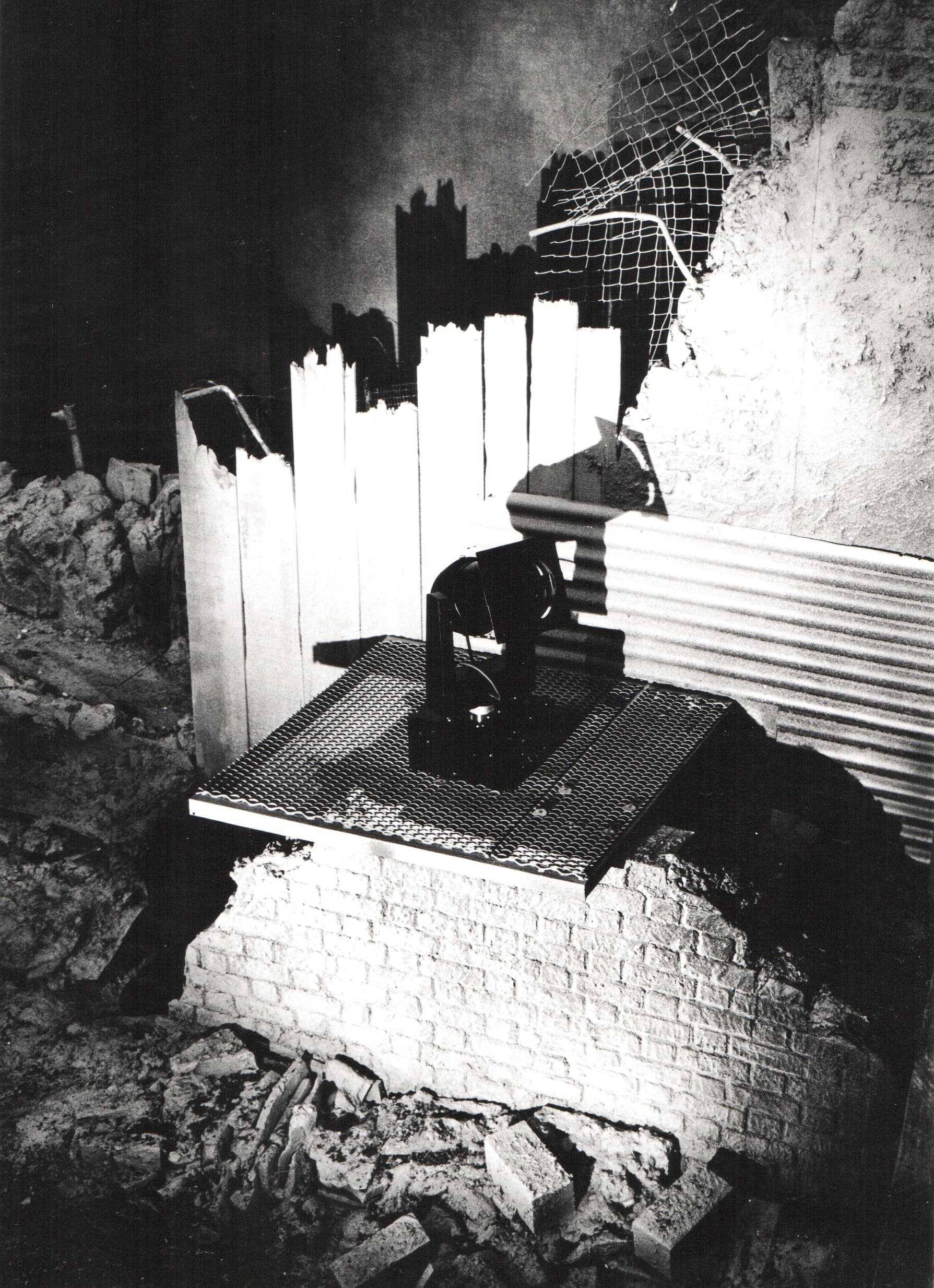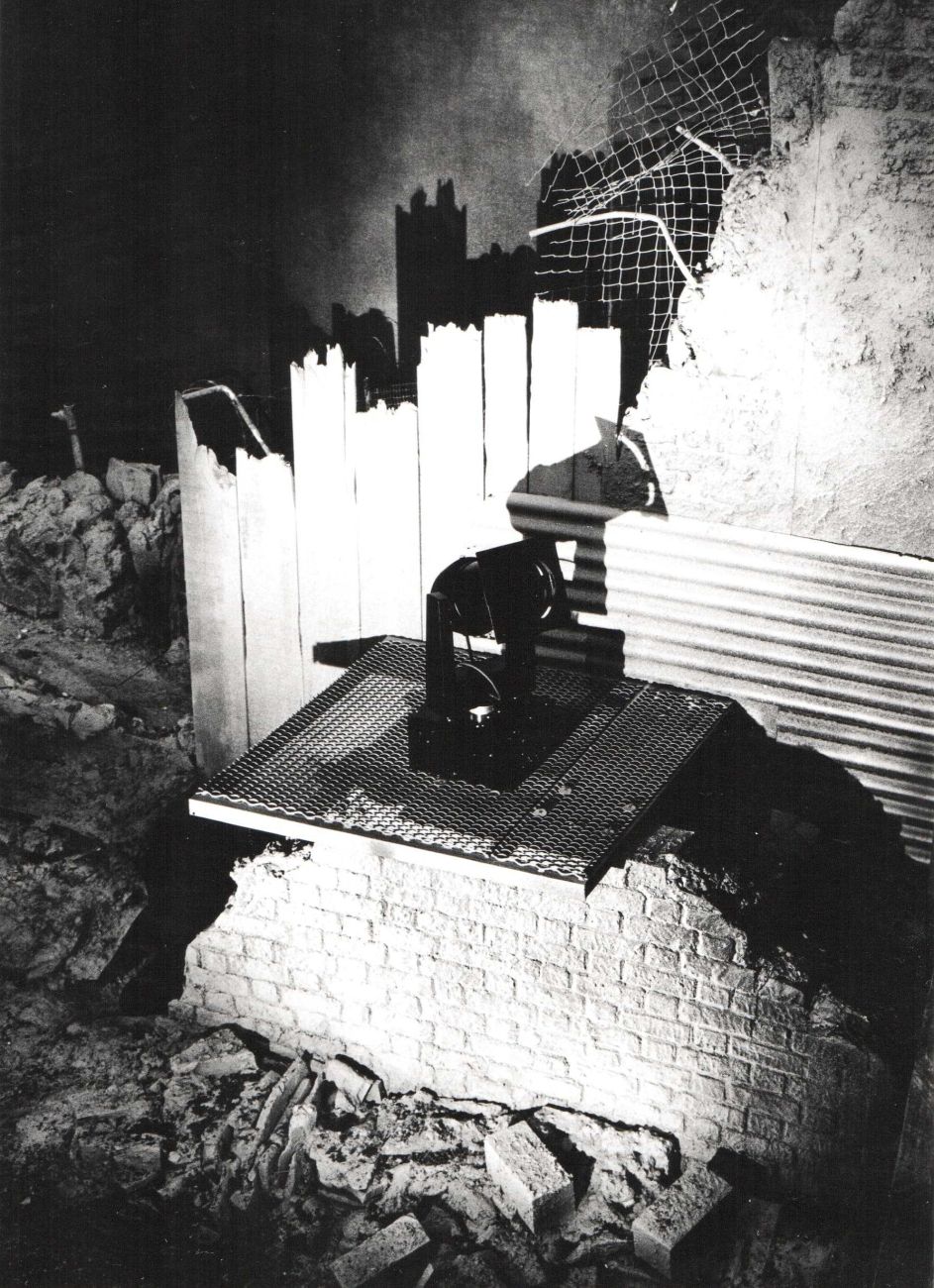
The Robocan was designed and developed by Julian Baycock in 1989 and was Robolights first ever product. The Robocan was built around a conventional PAR64 Parcan as it was a powerful, lightweight and easily modified lightsource. The Parcan was fitted into a yoke that could pan 320 degrees and tilt through about 240 degrees. The control system was entirely analogue, designed to work with the 0 to minus 10V dimmer control signal that was in common use at the time. The Robocan made it's first appearance at the Northcott Theatre in Exeter where it was under control of a Strand Gemini lighting desk. This desk generated the Strand D54 multiplex protocol which provided the Robocan with it's two control channels via a demux box. Although long into it's retirement the prototype Robocan still works to this day.